Chapter 7: Linear Programming
-
Linear Programming
- Maximizing or minimizing an objective function under a list of constraints
- Each constraint is a linear inequation forming a half-space
- Optimum is reached at vertices unless:
- program is infeasible, e.g. \(x \leq 1, x \geq 2\)
- program is unbounded, i.e. it's possible to reach arbitrarily high/low
values
Simplex Algorithm
- Start at a vertex, looks at neighboring vertices for a higher value
- Does hill-climbing on the vertices.
- Local optimality implies global optimality
-
- - if all neighbours are on one side
of the "profit" plane, the rest must also be on the same side
Flows in Networks
-
Maximize flow from vertices \(s\) to \(t\) in directed graph \(G = (V,E)\)
- Derived algorithm (what simplex is essentially doing)
-
- Start with 0 flow
- Choose an appropriate path from s to t, and increase flow as
much as possible along
this path.
-
Simplex allows paths to cancel existing flow
-
For each iteration, the \(s-t\) path has edges \((u, v)\) that:
-
-
Are in the original network, and is not at full capacity, or
-
Is the reverse of an edge \((v, u)\) in the network, and has flow along it
- Residual network \(G^f\)
-
\(c^f = \begin{cases}
c_{uv}-f_{uv} & \text{if $(u,v) \in E$ and $f_{uv} < c_{uv}$} \\
f_{vu} & \text{if $(v,u) \in E$ and $f_{vu}>0$}
\end{cases}\)
- For any flow \(f\) and any \((s,t)\)-cut \((L,R)\), size(\(f\)) \(\leq\) capacity
\((L,R)\)
- Max-flow min-cut theorem
The size of the maximum flow in the network equals the capacity of the smallest \({s,t}\)-cut
-
Min-cut \((L,R)\): \(L\) is all the nodes reachable in the residual graph \(G^f\) from \(s\) at
final flow, \(R = V - L\). Any
edge from \(L\) to \(R\) must have max flow, any edge from \(R\) to \(L\) must have 0 flow.
- Use residual network with derived algorithm instead
- \(O(|E|)\) to find \(s-t\) path for each iteration.
- Number of iterations is at most \(O(|V| \cdot |E|)\) if paths are found with BFS
(path with fewest edges)
- Overall runtime for maximum flow:\(O(|V|\cdot
|E|^2)\)
- Guarantees integrality if all edge capacities are integral. (see derived
algorithm)
-
Bipartite Matching
- Can be cast to max-flow
- Add source node connected to one partition, sink to other;
Set all capacities to 1.
-
Duality
-
Every linear maximization problem has a dual linear minimization problem
-
Variables of dual are multipliers of the inequalities of primal
- Example Problem
-
-
\(\begin{align}
\text{max } x_1 &+ 6x_2 \\
x_1 &\leq 200 \\
x_2 &\leq 300 \\
x_1 + x_2 &\leq 400 \\
x_1, x_2 &\geq 0
\end{align}\)
-
\(\begin{alignat*}{3}
\text{Multiplier}\qquad& \text{Inequality}&&\\
y_1\qquad& x_1&&\leq 200 \\
y_2\qquad& x_2 &&\leq 300 \\
y_3\qquad& x_1 + x_2 &&\leq 400 \\
\end{alignat*}\)
-
\((y_1 + y_3)x_1 + (y_2 + y_3)x_2 ≤ 200y_1 + 300y_2 + 400y_3\)
-
\(
x_{1}+6 x_{2} \leq 200 y_{1}+300 y_{2}+400 y_{3} \quad \text { if } \quad
\left\{\begin{array}{c}{y_{1}, y_{2}, y_{3} \geq 0} \\ {y_{1}+y_{3} \geq 1} \\ {y_{2}+y_{3}
\geq
6}\end{array}\right\}
\)
-
So the initial problem has a dual minimization problem:
\(
\begin{array}{c}{\min 200 y_{1}+300 y_{2}+400 y_{3}} \\ {y_{1}+y_{3} \geq 1} \\ {y_{2}+y_{3}
\geq 6}
\\ {y_{1}, y_{2}, y_{3} \geq 0}\end{array}
\)
-
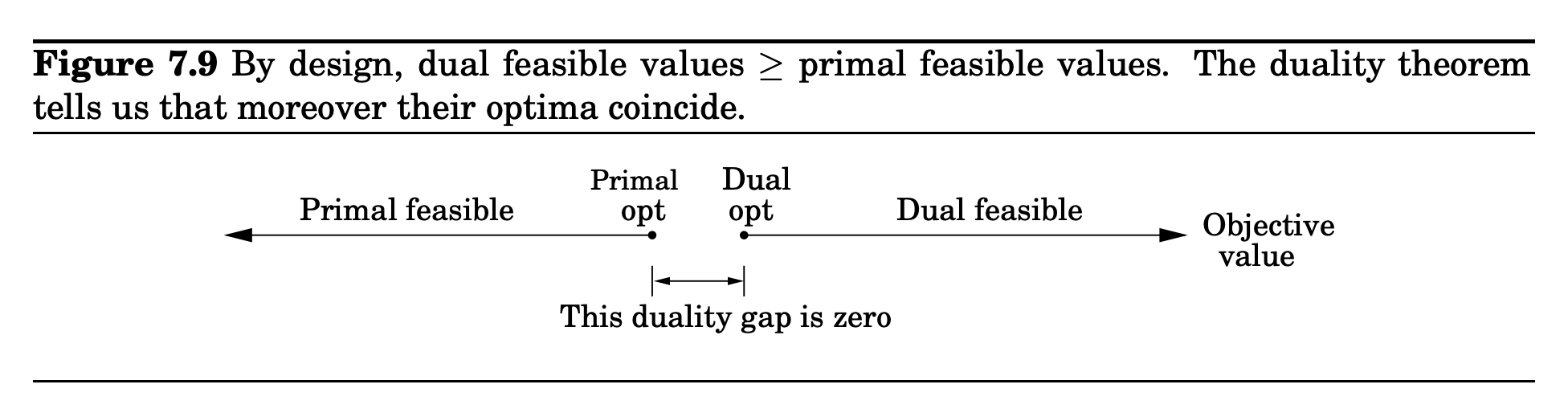
Dual feasible values \(\geq\) Primal feasible values
-
The optima for dual and primal coincide
-
-
Relation between Dual and Primal:
\(
\begin{array}{c}{\text { Primal LP: }} \\ { \text {max } \mathbf{c}^{T} \mathbf{x}} \\
{\mathbf{A} \mathbf{x} \leq \mathbf{b}} \\ {\quad\mathbf{x} \geq 0}\end{array}
\qquad
\begin{array}{c}{\text { Dual LP: }} \\ {\text { min } \mathbf{y}^{T} \mathbf{b}} \\
{\mathbf{y}^{T} \mathbf{A} \geq \mathbf{c}^{T}} \\ {\quad\mathbf{y} \geq 0}\end{array}
\)
- Duality theorem If a linear program has a bounded optimum, then so does
its dual, and
the
two optimum values coincide
- The dual of the max-flow problem is the min-cut problem
-
Bipartite Matching
-
Match vertices in bipartite graphs / find set of edges \(M\) such that each vertex is adjacent to at
most 1 edge in \(M\) and \(M\) has maximum size
-
Alternating paths: paths that has edges alternating between \(M\) and \(E \setminus M\)